Amr Mousa
Senior AI Research Engineer and PhD Student
Virtual Vehicle Research GmbH
University of Manchester
About Me
I’m a PhD student at the University of Manchester, working with the supervision of Richard Allmendinger, Wei Pan, and Michele Caprio. My research dives deep into the challenge of making Reinforcement Learning (RL) thrive in non‑stationary environments—an area that’s key to bringing RL out of the lab and into the messy, unpredictable real world.
Alongside my academic journey, I work at Virtual Vehicle Research GmbH in Graz, Austria, as a Senior Research and Development Engineer. There, I lead projects designing RL policies for legged robots in search‑and‑rescue missions and develop intelligent agents for energy management in plug‑in hybrid vehicles—blending cutting‑edge AI with greener, smarter mobility.
- Reinforcement Learning
- Self-Supervised Learning
- Representation Learning
- Robotics
- Automotive and Aerospace
Master of Engineering Management, 2022
Arizona State University
Master of Automotive Mechatronics, 2021
FH Oberösterreich
Bachelor of Aerospace Engineering, 2018
Zewail City, Egypt

Highlighted Work

Working Experience
- Master’s Thesis Supervision: Mentoring graduate students in several research areas including Statistics, Reinforcement Learning and robotics.
- Research Assistant: Contributing to data analysis projects and research initiatives across two academic semesters
- Peer Review: Serving as reviewer for prestigious conferences and journals including NeurIPS and other top-tier publications in AI and robotics
Key projects include:
Developing robust RL-based locomotion policy for legged robots:
Using Meta-Reinforcement Learning to develop a locomotion policy for the quadruped robot -Unitree Go1- to be able to robustly navigate different environments for survival and rescue missions.
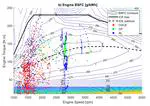
RL-based Energy Management Strategy for P2-PHEVs:
Implementing a novel A3C agent that outperformed the existing rule-based control strategy and was integrated into the vehicle HCU for testing in HiL and ViL. The project resulted in two publications and a patent.
Key projects include:
Adaptive interiors control with a German OEM - Project Lead:
Developing an imitation learning RL agent that learns and predicts the driver preferences based on the driver mood, driving behavior and vehicle situation.
RL-based Thermal Management for Battery Electric Vehicles:
Improving the vehicle energy consumption by utilizing the heat sources to meet the cabin comfort requirements, powertrain, and battery optimal efficiencies.
See Employer Letter
Honors
Certificates
Gallery
Highlighted imagery capturing moments from conferences and academic gatherings






Contact
- amr.mousa@postgrad.manchester.ac.uk
- Alliance Manchester Business School, Booth Street West, Manchester, M15 6PB, United Kingdom